As the core sensor of many intelligent devices, LiDAR has been widely used. Nowadays, we can frequently see LiDAR in driverless cars, service robots, AGV forklifts, intelligent road administration and transportation, and automated production lines , which is enough to show its indispensable position in the artificial intelligence industry chain.
As far as the mainstream lidar products on the market are concerned, the radars used for environmental detection and map construction can be roughly divided into two categories according to the technical route: one is TOF (Time of Flight) radar, and the other is triangulation radar. I believe that many people are familiar with these two terms, but to say which of these two solutions is better in principle, performance, cost, and application, and what are the reasons behind them, perhaps everyone is more or less confused. Today, the editor will throw out some ideas and analyze these issues.
1. Principle
The principle of triangulation is shown in the figure below. The laser emits laser light. After irradiating the object, the reflected light is received by the linear CCD. Since the laser and the detector are separated by a distance, objects at different distances will be imaged at different positions on the CCD according to the optical path. By calculating according to the triangulation formula, the distance of the measured object can be deduced.
Just looking at the principle, it seems quite simple.
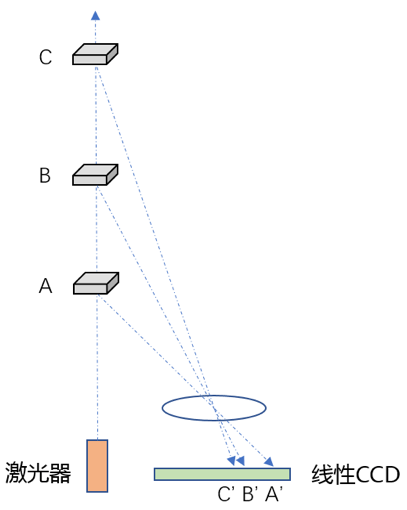
Figure 1. Principle of triangulation distance measurement
However, the principle of TOF is much simpler. As shown in Figure 2, the laser emits a laser pulse, and the time of emission is recorded by the timer. The returning light is received by the receiver, and the timer records the return time. Subtracting the two times gives the "flight time" of light, and the speed of light is constant, so it is easy to calculate the distance after knowing the speed and time.
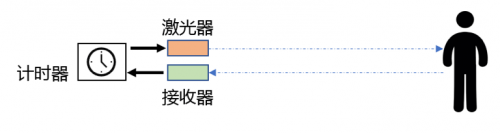
Figure 2. TOF ranging principle
Unfortunately, if everything is as easy to do as it is to think about, the world would be a wonderful place. Both solutions have their own challenges in implementation, but in comparison, TOF obviously has much more difficulties to overcome.
The main difficulties in implementing TOF radar are:
1. The first is the timing problem. In the TOF scheme, distance measurement depends on time measurement. However, the speed of light is too fast, so to obtain accurate distance, the requirements for the timing system become very high. One data is that the laser radar needs to measure a distance of 1cm, and the corresponding time span is about 65ps. Students who are slightly familiar with electrical characteristics should know what this means to the circuit system.
2. The second is the processing of pulse signals. This is divided into two parts:
a) One is laser: Triangulation radar has almost no requirements for laser driving, because the measurement depends on the position of the laser echo, so only a continuous light emission is needed. But TOF is not the same, not only does it require pulsed laser, but the quality cannot be too bad. At present, the pulse width of the emitted light of TOF radar is about a few nanoseconds, and the rising edge is required to be as fast as possible, so the laser driving solutions of each product are also divided into high and low levels.
b) The other is the receiver. Generally speaking, echo moment identification is actually the time identification of the rising edge. Therefore, when processing the echo signal, it is necessary to ensure that the signal is as undistorted as possible. In addition, even if the signal is not distorted, since the echo signal cannot be an ideal square wave, the measurement of different objects at the same distance will also cause the front edge to change. For example, when measuring white paper and black paper at the same position, two echo signals may be obtained as shown in the figure below, and the time measurement system must measure that the two front edges are at the same time (because the distance is the same), which requires special processing.
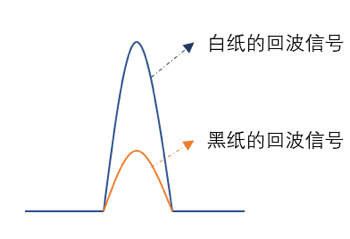
Figure 3. Differences in echo signals with different reflectivity
In addition, the receiving end also faces problems such as signal saturation and background noise processing, which can be said to be full of difficulties.
2. Performance PK: Knowing the facts can help you understand the reasons?
Having said so much, in fact, from the perspective of downstream users, they don’t care whether it is easy or difficult to implement. Users are most concerned about two points: performance and price. Let’s talk about performance first. If you know this industry, most people know that TOF radar is better than triangular radar in terms of performance. But in what specific aspects is it reflected, and what are the reasons behind it?
1. Measure distance
In principle, TOF radar can measure farther distances. In fact, in some occasions that require distance measurement, such as driverless car applications, TOF radar is almost always used. There are several main reasons why triangular radar cannot measure far: First, it is limited by principle. In fact, if you look closely at Figure 1, it is not difficult to find that the farther the object is measured by triangular radar, the smaller the position difference on the CCD is, so that after exceeding a certain distance, the CCD can hardly distinguish. Second, triangular radar cannot obtain a high signal-to-noise ratio like TOF radar. TOF uses pulsed laser sampling and can also strictly control the field of view to reduce the influence of ambient light. These are all prerequisites for long-distance measurement.
Of course, the length of distance does not represent absolute good or bad, it depends on the specific usage scenario.
2. Sampling rate
When the laser radar depicts the environment, it outputs a point cloud image. The number of point cloud measurements that can be completed per second is the sampling rate. When the rotation speed is constant, the sampling rate determines the number of point clouds in each frame of the image and the angular resolution of the point cloud. The higher the angular resolution and the more point clouds there are, the more detailed the image depicts the surrounding environment.
As for the products on the market, the sampling rate of triangulation radar is generally below 20k, while TOF radar can achieve a higher sampling rate (for example, the sampling rate of Starsecond's TOF radar PAVO can reach up to 100k). The reason is that TOF only needs one light pulse to complete a measurement, and real-time time analysis can also respond quickly. However, the calculation process required by triangulation radar takes longer.
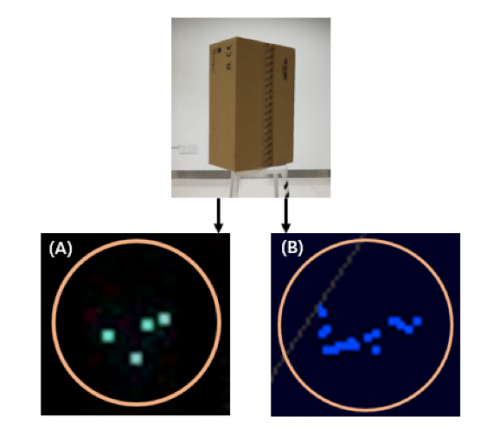
Figure 4: Imaging effects of different sampling rates for objects at the same location
(A): Low sampling rate point cloud pattern; (B): High sampling rate point cloud pattern (PAVO)
3. Accuracy
LiDAR is essentially a distance measuring device, so the accuracy of distance measurement is undoubtedly the core indicator. In this regard, the accuracy of triangulation is very high at close range, but as the distance increases, the accuracy of its measurement will become worse and worse. This is because the measurement of triangulation is related to angles, and as the distance increases, the angle difference will become smaller and smaller. Therefore, when marking the accuracy of triangulation radar, percentage marking is often used (commonly 1%), so the maximum error is 20cm at a distance of 20m. TOF radar relies on flight time, and the time measurement accuracy does not change significantly with the increase of length. Therefore, most TOF radars can maintain an accuracy of several centimeters within a measurement range of tens of meters.
2. Rotation speed (frame rate)
In mechanical radars, the image frame rate is determined by the speed of the motor. As far as the two-dimensional laser radars currently on the market are concerned, the maximum speed of triangular radars is usually below 20Hz, while TOF radars can reach around 30Hz-50Hz. Triangular radars usually adopt a structure with upper and lower parts, that is, the upper rotating part is responsible for laser emission, reception and acquisition, and the lower part is responsible for motor drive and power supply, etc. The heavy moving components limit the higher speed. TOF radars usually adopt an integrated semi-solid structure, and the motor only needs to drive the reflector, so the power consumption of the motor is very small, and the speed that can be supported is also higher.
Of course, the difference in rotation speed mentioned here is just an objective analysis of existing products. In fact, there is no essential connection between rotation speed and whether the radar uses TOF or triangulation. The mainstream multi-line TOF radar also adopts the upper and lower split structure. After all, the optical design of the coaxial structure is subject to many restrictions. The rotation speed of multi-line TOF radar is generally below 20Hz.
However, high rotation speed (or high frame rate) is very meaningful for point cloud imaging. High frame rate is more conducive to capturing high-speed moving objects, such as vehicles on the highway. In addition, when building its own map, the moving radar map will be distorted (for example, if a stationary radar scans a circle, then when the radar moves in a straight line, the scanned image becomes an ellipse). Obviously, high rotation speed can better reduce the impact of this distortion.
3. Cost
If we only look at the performance comparison, it seems that TOF radar completely outperforms triangular radar. However, product competition is not just a competition of performance parameters. Users also care about price, stability, and service.
At least in terms of cost, the cost of triangular radar is currently lower than that of TOF radar. The cost of short-range triangular radar is already in the hundreds of yuan level. However, the current price of imported TOF radar is often more than 10,000 yuan. It can be said that the high price is an important factor limiting the further expansion of TOF lidar applications.
However, with the rise of domestic TOF radar manufacturers in recent years, the cost of TOF radar has been greatly reduced, and the price of domestic TOF radar products is already quite competitive compared to imported brands. In the future, with the improvement of production technology and further increase in shipments, it is believed that the cost of TOF radar will be further reduced, and it is not impossible to reduce it to a level similar to that of triangular radar.
IV. Application Scenarios
The main application scenarios of triangular radar are short-distance indoor applications, and the most typical scenario is the sweeping robot. In scenarios with a larger detection range (such as shopping malls, airports or stations), as well as outdoor scenarios, TOF is more widely used. It is also worth mentioning that the triangular radar's exposed rotation makes its products very fragile in terms of dust and water resistance. In some special scenarios, such as the workshop where the AVG car works, there is often a lot of dust. In this environment, the motor of the triangular radar is very easy to be damaged. In contrast, the semi-solid design used by TOF radar can have better protection effects and a longer working life.
Figure 5: Starsecond TOF LiDAR PAVO
At present, domestic TOF radar is developing rapidly. The 2D TOF laser radar PAVO launched by SIMINICS can achieve a measurement distance of 20m, a point cloud rate of 100kHz, a maximum angular resolution of 0.036°, and an IP65 protection level. Its applications have involved unmanned driving, robots, AGV, security, road administration and many other fields. It is an excellent representative of domestic TOF radar.
Previous article:Sophisticated Advanced Driver Assistance Systems (ADAS) focus on functional safety of image sensing
Next article:WPG Group promotes NXP's new matrix LED controller solution
Recommended ReadingLatest update time:2024-11-16 16:03

- Popular Resources
- Popular amplifiers
-
 西门子S7-12001500 PLC SCL语言编程从入门到精通 (北岛李工)
西门子S7-12001500 PLC SCL语言编程从入门到精通 (北岛李工) - LiDAR point cloud tracking method based on 3D sparse convolutional structure and spatial...
- GenMM - Geometrically and temporally consistent multimodal data generation from video and LiDAR
- Comparative Study on 3D Object Detection Frameworks Based on LiDAR Data and Sensor Fusion Technology
 西门子S7-12001500 PLC SCL语言编程从入门到精通 (北岛李工)
西门子S7-12001500 PLC SCL语言编程从入门到精通 (北岛李工) 3D TOF Robot: Obstacle Detection, Collision Avoidance and Navigation
3D TOF Robot: Obstacle Detection, Collision Avoidance and Navigation 3D TOF occupancy detection: body tracking and counting
3D TOF occupancy detection: body tracking and counting Live replay: The starting point of autonomous driving and artificial intelligence - millimeter wave radar and 3D ToF solutions
Live replay: The starting point of autonomous driving and artificial intelligence - millimeter wave radar and 3D ToF solutions Seminar: ADI TOF (Time of Flight) technology introduction and product application
Seminar: ADI TOF (Time of Flight) technology introduction and product application




- Car key in the left hand, liveness detection radar in the right hand, UWB is imperative for cars!
- After a decade of rapid development, domestic CIS has entered the market
- Aegis Dagger Battery + Thor EM-i Super Hybrid, Geely New Energy has thrown out two "king bombs"
- A brief discussion on functional safety - fault, error, and failure
- In the smart car 2.0 cycle, these core industry chains are facing major opportunities!
- The United States and Japan are developing new batteries. CATL faces challenges? How should China's new energy battery industry respond?
- Murata launches high-precision 6-axis inertial sensor for automobiles
- Ford patents pre-charge alarm to help save costs and respond to emergencies
- New real-time microcontroller system from Texas Instruments enables smarter processing in automotive and industrial applications






- Innolux's intelligent steer-by-wire solution makes cars smarter and safer
- 8051 MCU - Parity Check
- How to efficiently balance the sensitivity of tactile sensing interfaces
- What should I do if the servo motor shakes? What causes the servo motor to shake quickly?
- 【Brushless Motor】Analysis of three-phase BLDC motor and sharing of two popular development boards
- Midea Industrial Technology's subsidiaries Clou Electronics and Hekang New Energy jointly appeared at the Munich Battery Energy Storage Exhibition and Solar Energy Exhibition
- Guoxin Sichen | Application of ferroelectric memory PB85RS2MC in power battery management, with a capacity of 2M
- Analysis of common faults of frequency converter
- In a head-on competition with Qualcomm, what kind of cockpit products has Intel come up with?
- Dalian Rongke's all-vanadium liquid flow battery energy storage equipment industrialization project has entered the sprint stage before production
- Allegro MicroSystems Introduces Advanced Magnetic and Inductive Position Sensing Solutions at Electronica 2024
- Car key in the left hand, liveness detection radar in the right hand, UWB is imperative for cars!
- After a decade of rapid development, domestic CIS has entered the market
- Aegis Dagger Battery + Thor EM-i Super Hybrid, Geely New Energy has thrown out two "king bombs"
- A brief discussion on functional safety - fault, error, and failure
- In the smart car 2.0 cycle, these core industry chains are facing major opportunities!
- The United States and Japan are developing new batteries. CATL faces challenges? How should China's new energy battery industry respond?
- Murata launches high-precision 6-axis inertial sensor for automobiles
- Ford patents pre-charge alarm to help save costs and respond to emergencies
- New real-time microcontroller system from Texas Instruments enables smarter processing in automotive and industrial applications
- How to install and use pressure transmitter
- The flashing prompt cannot recognize the device. What's going on?
- Model-Based Design and Its Embedded Implementation
- Q&A on Connectivity: Why Wi-Fi 6 Could Be Your Competitive Advantage
- Why do we need to learn transistor circuits when we already have integrated circuits?
- 2. Hardware Introduction and Development Environment Installation
- 【New Year's Festival Competition】+ Watching Lanterns on the Lantern Festival (multiple photos)
- 5G small base stations are under the spotlight: now is the eve of the outbreak
- 【CH579M-R1】+ PWM breathing light
- [Experience] [Free trial of Letuo USB oscilloscope] Comparison test of Letuo USB oscilloscope






 京公网安备 11010802033920号
京公网安备 11010802033920号