a small design for practice, a little ugly. Attached is the program and the principle PCB diagram. It is
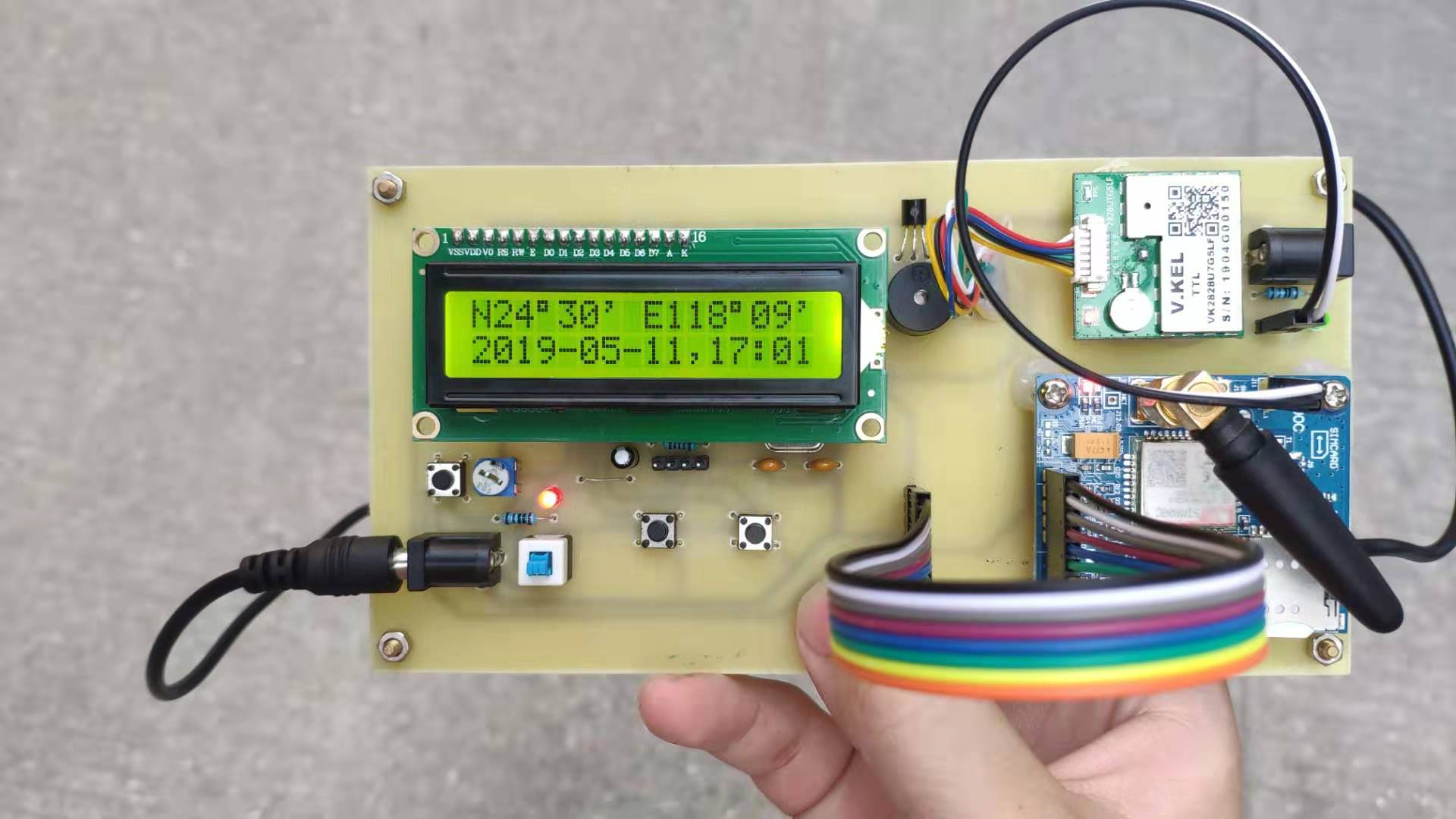
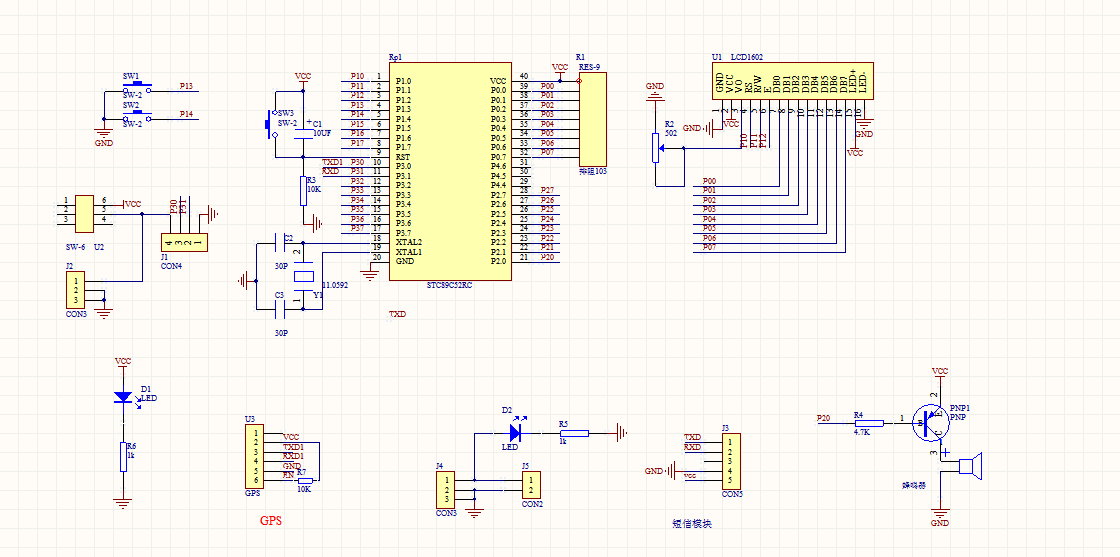
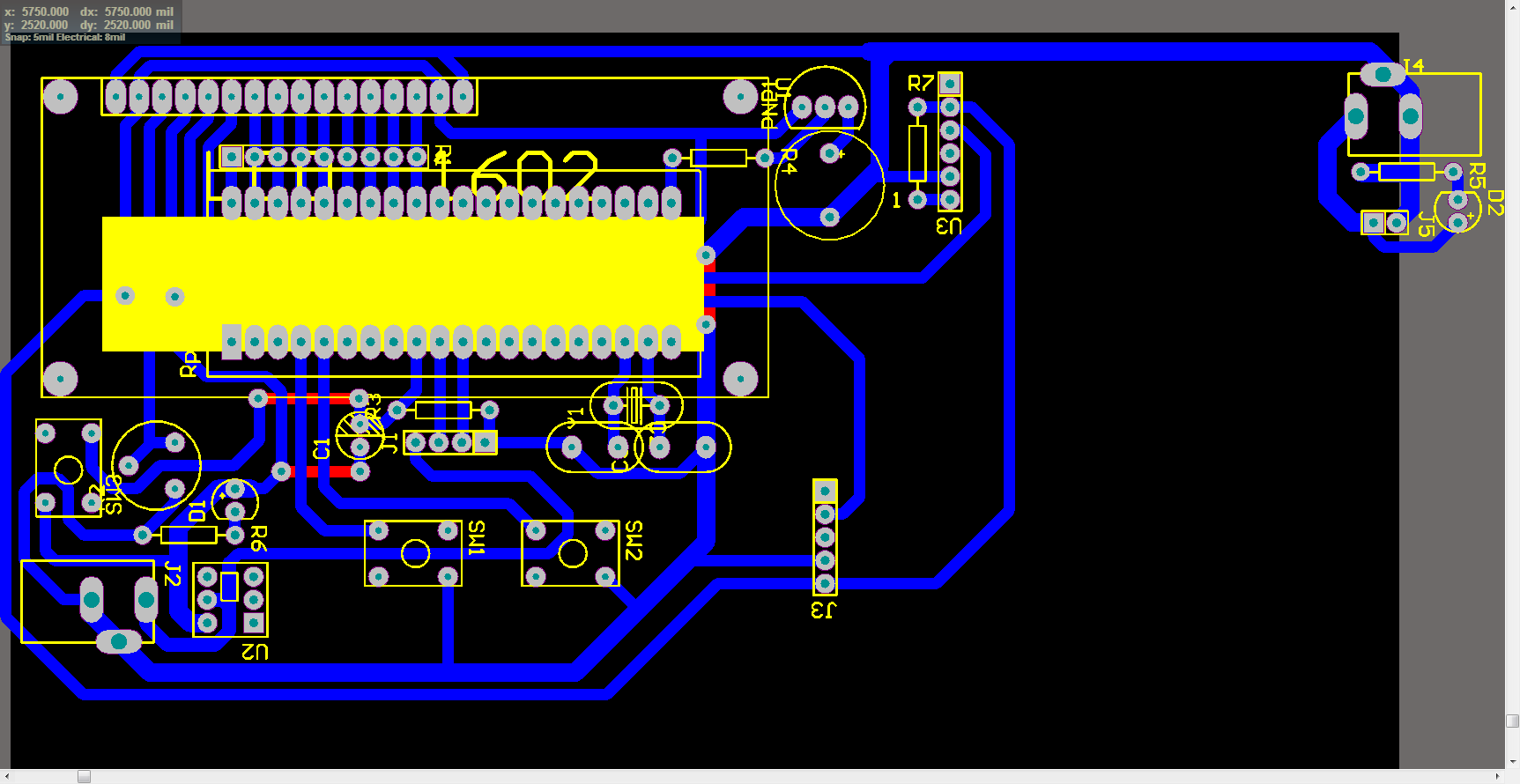
my first post, please forgive me if it is not good.
Button function: one button alarms, buzzer sounds, another button sends a text message to the specified mobile phone, the mobile phone number is written in the program.
The microcontroller source program is as follows:
#include "common.h"
#include "uart.h"
#include "gps.h"
#include "gsm.h"
#include "lcd.h"
#define GPS_STR_LEN 48
fly ess_inc;
//char xdata GPS_SEND_STR[GPS_STR_LEN];
sbit key = P1^3;
sbit key1 = P1^4;
sbit GPS_EN=P3^4;
sbit led1 = P3^3;
#define RMC_YES led1 = 0
#define RMC_NO led1 = 1
GPS_INFO GPS; //GPS information structure
bit GPS_rx_flag = 0;
bit GPS_Have_flag = 0;
#define SEND_NUMBER "AT+CMGS="13420106297"rn"
char xdata send_data[37]="N: ',E: ',2000-00-00,00:00rn";
unsigned char send_len= 0;
bit dis_flag = 1;
bit sendflag=0;
/****************************************
display time
/****************************************/
void GPS_DispTime(void)
{
fly i = 0;
fly ch;
char time[5];
Int_To_Str(GPS.D.year,time);//年
LCD1602_Set_AC(0, 1);
i = 0;
send_len = 18;
while(time[i] != '')
{
ch = time[i++];
LCD1602_write_data(ch);
send_data[send_len++] = ch;
}
LCD1602_write_data('-');
Int_To_Str(GPS.D.month,time);//月
LCD1602_Set_AC(5, 1);
i = 0;
send_len = 23;
while(time[i] != '')
{
ch = time[i++];
LCD1602_write_data(ch);
send_data[send_len++] = ch;
}
LCD1602_write_data('-');
Int_To_Str(GPS.D.day,time);//日
LCD1602_Set_AC(8, 1);
i = 0;
send_len = 26;
while(time[i] != '')
{
ch = time[i++];
LCD1602_write_data(ch);
send_data[send_len++] = ch;
}
LCD1602_write_data(',');
Int_To_Str(GPS.D.hour,time);//time
LCD1602_Set_AC(11, 1);
i = 0;
send_len = 29;
while(time[i] != '')
{
ch = time[i++];
LCD1602_write_data(ch);
send_data[send_len++] = ch;
}
LCD1602_write_data(':');
Int_To_Str(GPS.D.minute,time);//分
LCD1602_Set_AC(14, 1);
i = 0;
send_len = 32;
while(time[i] != '')
{
ch = time[i++];
LCD1602_write_data(ch);
send_data[send_len++] = ch;
}
}
void GPS_DisplayOne(void)
{
flying len,ch, i;
char info[10];
ess_inc = 0;
// memset(GPS_SEND_STR, 0, GPS_STR_LEN);
if (GPS.NS == 'N') //Judge whether it is north latitude or south latitude
{
if(dis_flag)
LCD1602_DisplayChar(0, 0, 'N');
else
LCD1602_DisplayChar(0, 0, ' ');
// GPS_SEND_STR[ess_inc ++] = 'N';
only = 0;
Int_To_Str(GPS.latitude_Degree,info); //Latitude
LCD1602_Set_AC(1, 0);
i = 0;
send_len = 2;
while(info[i] != '')
{
ch = info[i++];
if(dis_flag)
LCD1602_write_data(ch);
else
LCD1602_write_data(' ');
send_data[send_len++] = ch;
// GPS_SEND_STR[ess_inc ++] = ch;
only ++;
}
send_data[send_len++] = 'd';
if(dis_flag)
LCD1602_write_data(0xDF);
else
LCD1602_write_data(' ');
// GPS_SEND_STR[ess_inc ++] = 'd';
only ++;
Int_To_Str(GPS.latitude_Cent,info); //纬分
i = 0;
while(info[i] != '')
{
ch = info[i++];
if(dis_flag)
LCD1602_write_data(ch);
else
LCD1602_write_data(' ');
send_data[send_len++] = ch;
// GPS_SEND_STR[ess_inc ++] = ch;
only ++;
}
if(dis_flag)
LCD1602_write_data(0x27);
else
LCD1602_write_data(' ');
// GPS_SEND_STR[ess_inc ++] = 'm';
Int_To_Str(GPS.latitude_Second,info); //纬秒
i = 0;
while(info[i] != '')
{
ch = info[i++];
// GPS_SEND_STR[ess_inc ++] = ch;
}
// GPS_SEND_STR[ess_inc ++] = 's';
only ++;
while(7 - len)
{
only ++;
LCD1602_write_data(' ');
}
}
// GPS_SEND_STR[ess_inc] = ',';
ess_inc += 1;
if (GPS.EW == 'E') //Judge whether it is east longitude or west longitude
{
if(dis_flag)
LCD1602_DisplayChar(8, 0, 'E');
else
LCD1602_write_data(' ');
// GPS_SEND_STR[ess_inc ++] = 'E';
only = 0;
Int_To_Str(GPS.longitude_Degree,info); //Longitude
LCD1602_Set_AC(9, 0);
i = 0;
send_len = 11;
while(info[i] != '')
{
ch = info[i++];
if(dis_flag)
LCD1602_write_data(ch);
else
LCD1602_write_data(' ');
send_data[send_len++] = ch;
// GPS_SEND_STR[ess_inc ++] = ch;
only ++;
}
send_data[send_len++] = 'd';
if(dis_flag)
LCD1602_write_data(0xDF);
else
LCD1602_write_data(' ');
// GPS_SEND_STR[ess_inc ++] = 'd';
only ++;
Int_To_Str(GPS.longitude_Cent,info); //Longitude cents
i = 0;
while(info[i] != '')
{
ch = info[i++];
if(dis_flag)
LCD1602_write_data(ch);
else
LCD1602_write_data(' ');
send_data[send_len++] = ch;
// GPS_SEND_STR[ess_inc ++] = ch;
only ++;
}
if(dis_flag)
LCD1602_write_data(0x27);
else
LCD1602_write_data(' ');
// GPS_SEND_STR[ess_inc ++] = 'm';
Int_To_Str(GPS.longitude_Second,info); //Longitude seconds
i = 0;
while(info[i] != '')
{
ch = info[i++];
// GPS_SEND_STR[ess_inc ++] = ch;
}
// GPS_SEND_STR[ess_inc ++] = 's';
only ++;
while(7 - len)
{
only ++;
LCD1602_write_data(' ');
}
}
GPS_DispTime();
// GPS_SEND_STR[ess_inc] = ' ';
ess_inc += 1;
if(sendflag==1)
{
sendflag = 0;
gsm_send_englishmsg(SEND_NUMBER,send_data);//Send location SMS
delay_ms(1000);
delay_ms(1000);
LCD1602_DisplayString(0,0," SEND OK ");
delay_ms(1000);
LCD1602_DisplayString(0,0," ");
}
// GPS_DispSpeed(GPS.speed, 10, 1);
// if (GPS.D.second == 0)
// {
// if (GPS_Have_flag)
// {
// gsm_send_englishmsg(phonenum,GPS_SEND_STR); //Send location SMS
// }
// else
// {
// //gsm_send_englishmsg(phonenum,"GPS No Signal");//Send SMS
// }
// }
}
void main(void)
{
fly error_num = 0;
uint count = 0;
GPS_EN = 0;
GPS_rx_flag = 0;
LCD1602_Initialize(); //LCD1602 display initialization
uart_init(UART_B9600);
GPS_EN = 1;
GPS_rx_flag = 1;
BG = 0;
LCD1602_DisplayString_Center(0,"GPS SCAN...");
LCD1602_ClearLine(1);
while(1)
{
if (rev_stop) //If a line is received
{
if (GPS_RMC_Parse(RX1_Buffer, &GPS)) //解析GPRMC
{
RMC_YES;
GPS_DisplayOne(); //Display the first page of GPS information
error_number = 0;
gps_flag = 0;
rev_stop = 0;
GPS_Have_flag = 1;
……………………
Previous article:Simple game Proteus simulation program based on LCD12864 and 51 single chip microcomputer
Next article:Ultra-small wireless transceiver module LT8920 configuration ideas + microcontroller transmission and reception program
Recommended ReadingLatest update time:2024-11-16 17:58

- Popular Resources
- Popular amplifiers
 Multi-sensor fusion in autonomous driving: a survey
Multi-sensor fusion in autonomous driving: a survey
 Professor at Beihang University, dedicated to promoting microcontrollers and embedded systems for over 20 years.
Professor at Beihang University, dedicated to promoting microcontrollers and embedded systems for over 20 years.






- Innolux's intelligent steer-by-wire solution makes cars smarter and safer
- 8051 MCU - Parity Check
- How to efficiently balance the sensitivity of tactile sensing interfaces
- What should I do if the servo motor shakes? What causes the servo motor to shake quickly?
- 【Brushless Motor】Analysis of three-phase BLDC motor and sharing of two popular development boards
- Midea Industrial Technology's subsidiaries Clou Electronics and Hekang New Energy jointly appeared at the Munich Battery Energy Storage Exhibition and Solar Energy Exhibition
- Guoxin Sichen | Application of ferroelectric memory PB85RS2MC in power battery management, with a capacity of 2M
- Analysis of common faults of frequency converter
- In a head-on competition with Qualcomm, what kind of cockpit products has Intel come up with?
- Dalian Rongke's all-vanadium liquid flow battery energy storage equipment industrialization project has entered the sprint stage before production
- Allegro MicroSystems Introduces Advanced Magnetic and Inductive Position Sensing Solutions at Electronica 2024
- Car key in the left hand, liveness detection radar in the right hand, UWB is imperative for cars!
- After a decade of rapid development, domestic CIS has entered the market
- Aegis Dagger Battery + Thor EM-i Super Hybrid, Geely New Energy has thrown out two "king bombs"
- A brief discussion on functional safety - fault, error, and failure
- In the smart car 2.0 cycle, these core industry chains are facing major opportunities!
- The United States and Japan are developing new batteries. CATL faces challenges? How should China's new energy battery industry respond?
- Murata launches high-precision 6-axis inertial sensor for automobiles
- Ford patents pre-charge alarm to help save costs and respond to emergencies
- New real-time microcontroller system from Texas Instruments enables smarter processing in automotive and industrial applications
- [SC8905 EVM Review] + Unboxing test and driver installation
- How to detect inductor saturation | Comment and win a gift!
- Optimizing EMC and Efficiency in High Power DC/DC Converters Part 2
- [McQueen Trial] + Line-following Driving + Ultrasonic Obstacle Avoidance
- Can the freewheeling diode be omitted when the MOS tube controls the solenoid valve?
- STEVAL-MKSBOX1V1 (SensorTile.box) firmware download via USB
- Gallium nitride is a key technology for realizing 5G
- STM32 output 4-20MA or 0-10V circuit sharing
- LIS2MDL array PCB engineering and code information for magnetic nail navigation AGV car
- Live Review: Rochester Electronics Semiconductor Full-Cycle Solutions (including videos, materials, Q&A)






 京公网安备 11010802033920号
京公网安备 11010802033920号