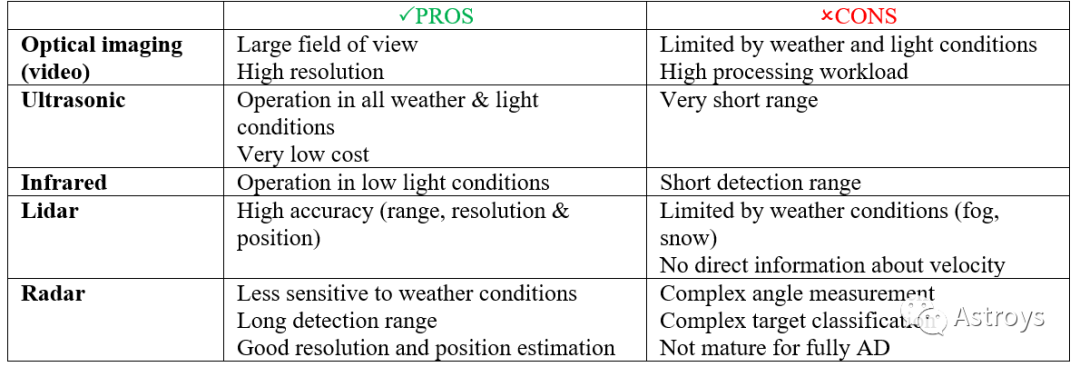
Among sensors for ADAS and autonomous driving, radar has proven to be very reliable for ADAS applications such as ACC. Radar applications are expected to expand in the future, as radar is often used with other sensing technologies such as cameras and LiDAR. The table below summarizes the pros and cons of different types of sensors.
Fully autonomous driving requires the fusion of data obtained from different sensing technologies. With sensors distributed around the car, it will potentially provide 360-degree coverage, creating a safety "cocoon" around the car.
The radar can be easily mounted behind common vehicle components, such as bumpers or vehicle logos, so that it does not affect the aesthetics. The 76-81GHz frequency band has been accepted by most countries as the frequency band for automotive radar. As radar antennas become smaller in size, the job of physically integrating high frequencies becomes easier. However, new challenges arise as frequency increases due to power trade-offs, higher losses and the impact of higher manufacturing tolerances.
Radar is also particularly suitable for vehicle applications because vehicles are good reflectors of radar waves. It can be used both for comfort functions, such as ACC, and for high-resolution sensing applications, which increases the vehicle's passive and active safety performance. Examples include blind spot detection, lane change assist, rear cross-traffic alert, and detection of pedestrians and cyclists near the vehicle.
Currently, radars are basically classified according to their detection range:
Short-range radar: detection distance up to 50 meters, wide field of view, high resolution
Mid-range radar: detection range up to 100 meters, medium field of view
Long-range radar: 250 meters or more, narrower field of view, lower resolution
With the development of new technologies, the detection range is expected to exceed these limitations, while increasing the vertical detection dimension to provide a complete 3D image of the surrounding environment.
In the future, vehicles are expected to add multiple radar modules, upgrading from a basic forward-facing radar configuration (providing basic L1 functionality) to higher levels. Soon, more vehicles will be equipped with corner radar to achieve L2+ capabilities and NCAP Level 4-5, and higher levels L3-4 and NCAP Level 5.

However, how the radar data is processed will depend heavily on the vehicle architecture. The current trend of improving the performance of central computing units has also promoted the transformation of vehicle E/E architecture into a distributed architecture.
Although the migration to a fully distributed architecture will not be completed until 2030, partial implementations will appear on the market earlier. First, some domain controllers will be used for specific functions.
Additionally, the number of domain controllers will be increased and zonal controllers will also be introduced before a fully centralized E/E architecture is established where the vehicle’s central computer will be connected to the sensors through the zonal ECU. This development will also require increased capacity and reliability of vehicle networks, as well as software sophistication. This can create significant challenges, including additional connections that may require more expensive wiring harnesses to meet increasing data rate demands.
With the introduction of the new E/E architecture, part of the radar processing can be offloaded from the radar module (edge computing) to the zonal or central ECU, allowing for more efficient calculations. Today, complete radar processing is performed at the edge, using "smart sensors."
This means many independent radar modules are distributed around the vehicle, each with its own radar transceiver and processing capabilities. The processed data, usually a list of objects, is transferred to the ADAS ECU for further processing and possibly fusion with data from other sensors. By properly distributing sensors in the vehicle, the vehicle's environment can be correctly perceived and obstacles can be identified.

With the development of centralized computing architecture, the data processing of some radar modules may be transferred from the radar to a remote processing unit and processed directly by the zonal ECU or central computer. The radar module itself is not that "intelligent" and only performs limited processing of the received radar signals.
For example, this module will determine the distance to different objects and provide distance profiles to the remote processor. It will then receive pre-processed data from different satellite radar modules and perform the remaining processing steps on each set of data, generating a list of targets with their respective characteristics (distance, direction and speed) and creating a complete image of the surrounding environment. The results obtained will be fused together or combined with results from other sensors.
In the initial implementation of this centralized architecture, preprocessed data from different radars can be transmitted to the zonal or central ECU via an Ethernet backbone. When higher definition is required and the amount of data is excessive, such as with forward-looking or imaging radar, radar processing may still be performed on the sensor itself to reduce the amount of data to be transmitted.
Centralized processing of long-range radar data offers many advantages. First, the radar module itself becomes less complex, saving size and cost and reducing heat dissipation issues. Hardware and software repairs and upgrades will become easier.
Secondly, utilizing the car’s existing network, the Ethernet backbone, also reduces the cost and weight of wiring. Additionally, data transmitted over Ethernet will be available in a format that is easier to store and process.
Finally, data processing in vehicle control units opens the door to greater efficiency and more complex operations. Sensing capabilities can be enhanced by enabling data fusion with other sensing technologies (camera and LiDAR). Machine learning and AI can be considered for advanced detection and prediction, enabling higher levels of autonomous driving.
Edge processing and centralized computing are expected to coexist for several years. Migrating to a centralized computing architecture will require access to high-speed links throughout the vehicle, which may result in the use of different standards for data exchange. In addition to cost and layout complexity, there is no clear conclusion on which standard to use for data transfer. While CAN and Ethernet currently dominate, some manufacturers are pushing alternatives such as MIPI A-PHY.
In any case, additional security measures must be taken to ensure the integrity and security of transmitted data. For example, transmitting data over an Ethernet link requires additional processing and memory because media access control security (MACsec) and hardware security modules may be required.
In addition, as the number of radar modules continues to increase, they are all transmitting and receiving radio waves, which may also cause interference problems. Interference reduces the detection performance of radar systems, thereby reducing the functionality and safety of ADAS and autonomous driving systems. The industry is currently analyzing several mitigation strategies, which can be divided into three groups: obstacle avoidance, detection and remediation, and cooperation and communication-based mitigation.
Radar has become a key sensor for ADAS and autonomous driving applications. The imaging radar system consists of modules that require transceivers to cover the entire automotive radar frequency band; supports short, medium and long-range radar applications; and meets the needs of centralized processing. ECUs are also an important component of ADAS and autonomous driving solutions, which require advanced SoCs that support centralized processing and enable high-speed image recognition and processing of surrounding objects from cameras, radar, and LiDAR.
[Reference article]
Vehicle architectures challenges radar systems — Marta Martínez-Vásquez
Previous article:Learn about Nanochip’s new energy automotive sensor solutions in one article
Next article:SmartSens Launches New 8.3MP High-Resolution Automotive-Grade Image Sensor SC850AT for High-End ADAS Applications
- Popular Resources
- Popular amplifiers
 OP270BIGS
OP270BIGS- Car key in the left hand, liveness detection radar in the right hand, UWB is imperative for cars!
- After a decade of rapid development, domestic CIS has entered the market
- Aegis Dagger Battery + Thor EM-i Super Hybrid, Geely New Energy has thrown out two "king bombs"
- A brief discussion on functional safety - fault, error, and failure
- In the smart car 2.0 cycle, these core industry chains are facing major opportunities!
- The United States and Japan are developing new batteries. CATL faces challenges? How should China's new energy battery industry respond?
- Murata launches high-precision 6-axis inertial sensor for automobiles
- Ford patents pre-charge alarm to help save costs and respond to emergencies
- New real-time microcontroller system from Texas Instruments enables smarter processing in automotive and industrial applications






- Innolux's intelligent steer-by-wire solution makes cars smarter and safer
- 8051 MCU - Parity Check
- How to efficiently balance the sensitivity of tactile sensing interfaces
- What should I do if the servo motor shakes? What causes the servo motor to shake quickly?
- 【Brushless Motor】Analysis of three-phase BLDC motor and sharing of two popular development boards
- Midea Industrial Technology's subsidiaries Clou Electronics and Hekang New Energy jointly appeared at the Munich Battery Energy Storage Exhibition and Solar Energy Exhibition
- Guoxin Sichen | Application of ferroelectric memory PB85RS2MC in power battery management, with a capacity of 2M
- Analysis of common faults of frequency converter
- In a head-on competition with Qualcomm, what kind of cockpit products has Intel come up with?
- Dalian Rongke's all-vanadium liquid flow battery energy storage equipment industrialization project has entered the sprint stage before production
- Allegro MicroSystems Introduces Advanced Magnetic and Inductive Position Sensing Solutions at Electronica 2024
- Car key in the left hand, liveness detection radar in the right hand, UWB is imperative for cars!
- After a decade of rapid development, domestic CIS has entered the market
- Aegis Dagger Battery + Thor EM-i Super Hybrid, Geely New Energy has thrown out two "king bombs"
- A brief discussion on functional safety - fault, error, and failure
- In the smart car 2.0 cycle, these core industry chains are facing major opportunities!
- The United States and Japan are developing new batteries. CATL faces challenges? How should China's new energy battery industry respond?
- Murata launches high-precision 6-axis inertial sensor for automobiles
- Ford patents pre-charge alarm to help save costs and respond to emergencies
- New real-time microcontroller system from Texas Instruments enables smarter processing in automotive and industrial applications
- Simulation Help Post
- Based in Chengdu, job position: Reliability Engineer
- Use ST's new APP to instantly find the most suitable sensor
- [FM33LG0 series development board evaluation] 01. Prepare the development environment
- [XMC4800 Relax EtherCAT Kit Review] + Getting started with DAVE, quickly build your own webserver
- [GD32L233C-START Review] + Guess which light will be on next time
- TI Voltage Reference (VREF) Application Design Tips and Tricks
- What happens if the input voltage of the window comparator is equal to the upper and lower limits?
- Banknote number recognition system based on ARM.pdf
- My knowledge of computers






 京公网安备 11010802033920号
京公网安备 11010802033920号