|
The OP
Published on 2024-3-31 22:15
Only look at the author
This post is from RF/Wirelessly
| ||
|
|
||
 提升卡
提升卡 变色卡
变色卡 千斤顶
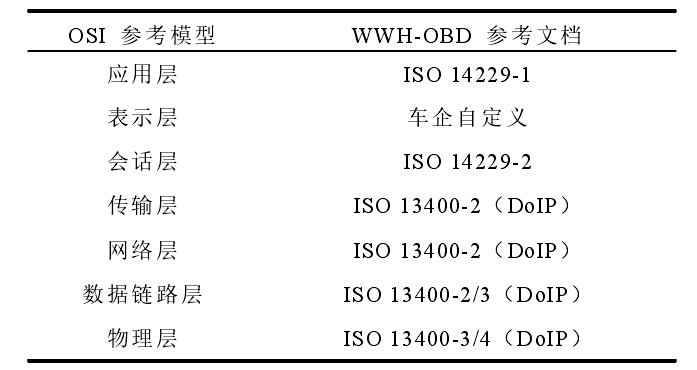
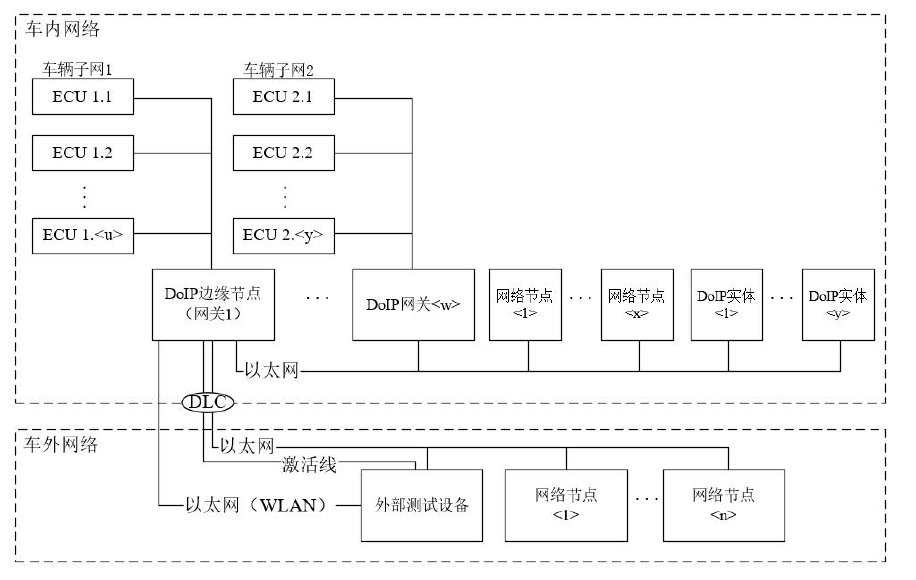
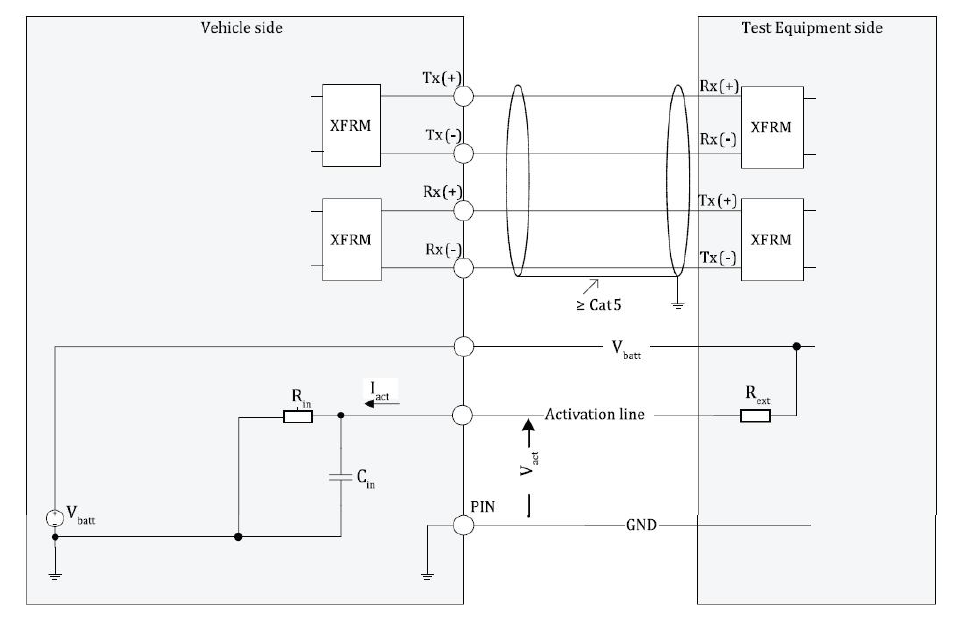
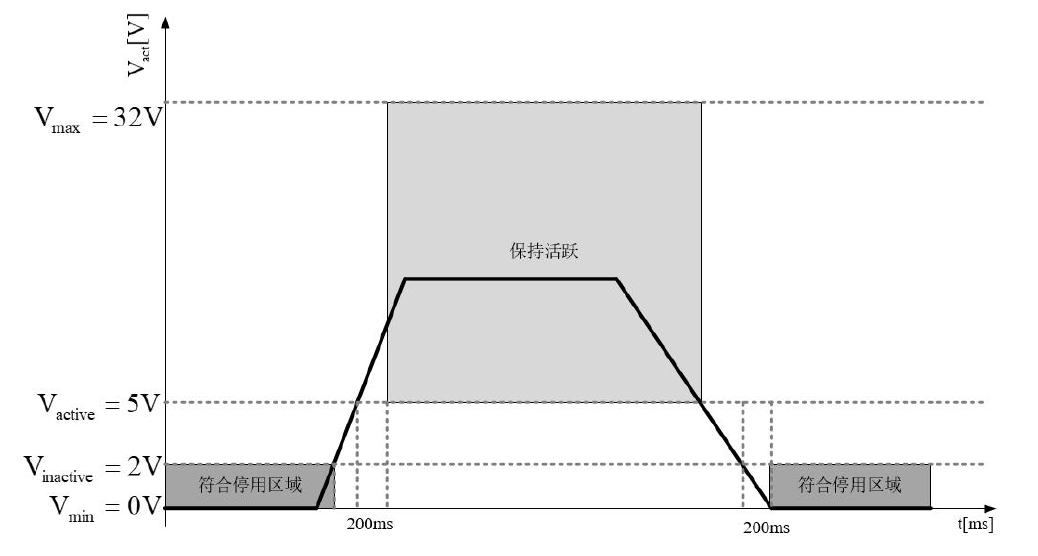
千斤顶- 【Posts】In-depth analysis: Automotive Ethernet DOIP protocol
- 【Posts】GD32F407ZET6+LAN8720, DMA Ethernet ported LWIP protocol stack, UDP communication ping test loses one packet every 65535 packets
- 【Posts】Automotive Ethernet
- 【Posts】[Jihai APM32F407 Tiny Board] Porting LWIP protocol stack under rt-thread system
- 【Posts】The Definitive Guide to Automotive Ethernet
- 【Posts】Why is there an error when adding the LWIP protocol stack using the DAVE environment for XMC4800?
- 【Posts】[Jihai APM32F407 Tiny Board] Porting LWIP protocol stack
- 【Posts】Automotive Ethernet (2nd) from BMW Kirsten Matheus
- 【Download】Linux + TCP / IP protocol stack
- 【Download】UIP protocol stack analysis
- 【Download】Serial port monitoring and TCPIP protocol analysis software V1.0.rar
- 【Download】Using TCP_IP protocol_labview program case in LabWindowsCVI
- 【Design】Network card driver and LWIP protocol transplantation program source code for Ethernet communication module based on LPC2138 and DM9000AE
- 【Articles】Architecture Analysis of Automotive Ethernet Protocol
- 【Articles】Analysis of RClamp10012PQ protection for automotive Ethernet
-
Su Ruide deeply analyzes the technical application of Geely King Kong CAN bus data in the driving school evaluation system
<class="p">InthefieldofautomotiveengineeringandCANbusdataapplication,CANdataacquisitionisakeytechnologyEspeciallyintoday'sincreasinglydevelopedintelligentnetworkedvehicles,efficientandaccuratedataacquisitiontechnologyisparticularlyimpor ...
-
In-depth analysis of LLC resonant converter circuit design and its working principle
Asoneoftheimportanttopologiesofresonantswitchingtechnology,LLCresonantconverterhasthecharacteristicsofhighefficiency,goodvoltageregulationcharacteristics,excellentworkingcharacteristicsinawideloadvariationrange,etcThisarticleexplainsthecomm ...
-
[Review of "Artificial Intelligence Practical Tutorial"] Python Function
#【《ArtificialIntelligencePracticeTutorial》Evaluation】PythonFunction##FunctionIfablockofcodeisneededmultipletimeswhendevelopingaprogram,butinordertoimprovetheefficiencyofwritingandthereuseofcode,thecodeblockswithindependentfunctionsareor ...
- Help! My newly bought power bank is broken!
- I have a question about the network port circuit?
- Power battery pack characteristic analysis and balanced management
- Can I change my nickname in the forum?
- GD32L233C-START Review——03_2.CoreMark Test, RT-Thread-Nano Porting
- Freescale Introduces QUICC Engine Technology for the Connected Digital Home
- A detailed guide to the Industrial Internet of Things: From risks to benefits
EEWorld Datasheet Technical Support
-
"Cross-chip" quantum entanglement helps build more powerful quantum computing capabilities
IBM scientists have achieved "cross-chip" quantum entanglement - successfully entangled two "Eagl
-
Ultrasound patch can continuously and noninvasively monitor blood pressure
A research team at the University of California, San Diego, has developed an innovative wearable
-
Europe's three largest chip giants re-examine their supply chains
At the Electronica 2024 CEO Roundtable held just last week, the CEOs of three chip giants, Infine
- It is reported that Kioxia will be approved for listing as early as tomorrow, and its market value is expected to reach 750 billion yen
- The US government finalizes a $1.5 billion CHIPS Act subsidy to GlobalFoundries to support the latter's expansion of production capacity in the US
- SK Hynix announces mass production of the world's highest 321-layer 1Tb TLC 4D NAND flash memory, plans to ship it in the first half of 2025
- UWB is a new way to use it in cars. Can wireless BMS also use it?
- Filling the domestic gap! China Mobile, Huawei and others jointly released the first GSE DPU chip
- Samsung Electronics NRD-K Semiconductor R&D Complex to import ASML High NA EUV lithography equipment
- Apple reveals the secret of its own chip success: competitors can't use the latest cutting-edge technology
- Problems with STM32 and passive buzzer playing sound
- Embedded Tutorial_DSP Technology_DSP Experiment Box Operation Tutorial: 2-28 Building a Lightweight WEB Server Experiment
- OPA847IDBVR op amp domestic replacement
- AG32VF407 Test UART
- [Digi-Key Follow Me Issue 2] Chapter 1: Sharing on receiving the goods
- What model is this infrared receiver? Which model can be used instead? Thank you
- Selling brand new unopened ZYNQ 7Z020 FPGA core board
- The LORA module used in the lithium battery-powered water meter setting can save energy when 100 water meters are installed in one corridor.
- I would like to ask, when a port is set to RX0, is it necessary to set the input and output direction of this port?
- Why is this year so difficult? It’s even more difficult than during the pandemic. I’m 30 and facing unemployment. I’m so confused.
- Ask about the voltage regulator test question
- [Xiaohua HC32F448 Review] About Xiaohua Semiconductor's UART interrupt sending and PRINTF construction and redirection
- 【BIGTREETECH PI development board】 HDMI output test
- 【BIGTREETECH PI development board】+08. Audio test (zmj)
- [Xiaohua HC32F448 Review] +RTC electronic clock
