Comparison of UWB positioning technologies: TOF & TDOA
[Copy link]

Ultra-wideband is a communication technology that allows you to locate people or objects with a high accuracy of 10-30 cm. There are two main positioning technologies when using ultra-wideband: time difference of arrival (TDOA) and time of flight (TOF).
Time of Flight (TOF)
TOF is a positioning method based on two-way ranging. This means that the tag needs to send and receive the signal of the anchor point many times, and then measure the flight time of the signal between the anchor point and the tag, because the radio wave propagates at the speed of light, we can calculate the distance between the tag and each anchor point.
TOF Communication Process
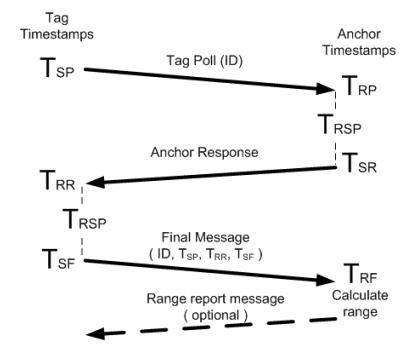
The tag sends a polling packet and records the timestamp, which is recorded as Tsp (Time start poll). The Anchor receives the polling packet and records Trp (Time receive poll). The Anchor takes some time to receive the signal and generates a response packet, which is named Trsp. The Anchor sends a Response message and records Tsr (response start time). The Tag receives the Response message and records Trr (receive response time). The tag takes time to receive the signal and generates a final message, which is named Trsp. The Tag sends a Final message and records Tsf (Time start Final). The Anchor receives the Final message and records Trf (Time receive Final).
ToF calculation formula:
After the above process, Anchor will know all the timestamp information, including: Tsp, Trp, Tsr, Trr, Tsf, Trf. Wrong formula: R={(Trp-Tsp)+(Trr-Tsr)+(Trf-Tsf)}/3. Since the time of Tag and Anchor is not synchronized, the timestamps recorded by each cannot be subtracted.
Right formula: R={(Trr-Tsp)-(Tsr-Trp)+(Trf-Tsr)-(Tsf-Trr)}/4. Tsr-Trp=Trsp, Tsf-Trr=Trsp.
Using the TOF method, the uwb tag should complete the distance measurement with each anchor point. AP1~AP3 represent 3 anchors. After the tag and the 3 anchors complete the distance measurement, there will be 3 corresponding distances, namely d1~d3. Draw three circles with each anchor as the center and d1~d3 as the radius. The three circles intersect at one point, which is the ideal position of the tag.
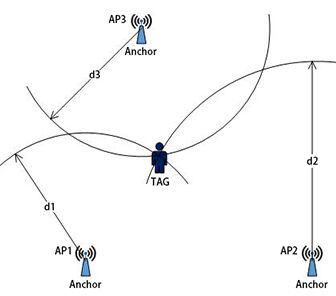
In the one-dimensional mode, if we have two anchor points for distance measurement, we can get the position of the tag. For the two-dimensional mode, three anchor points may be needed. If you want to get the X, Y, and Z coordinates of the tag, you need to prepare four anchor points. Anchor point.
Time difference of arrival (Tdoa)
TDOA is based on comparing the time difference between the signal and each anchor point for positioning. This technology requires precise time synchronization. When using the TDOA method, the UWB tag will send out a polling message, and all nearby UWB anchor points will receive the message and record the arrival of the anchors. Because the anchors are in different positions, the anchors will not receive the message at the same time. We can use these time differences to determine the location of the tag.
TDoA communication process
The tag sends a polling message, the anchor receives it and records the timestamp. The master anchor sends a synchronization message, the slave anchor receives it and performs synchronization processing.
TDoA calculation formula:
AP1: records polling arrival time as T1
AP2: Record polling arrival time as T2
AP3: Record polling arrival time as T3
AP1~AP3 refers to three anchor points. Since the time of AP1, AP2, and AP3 is synchronized,
DT1=T1-T2; the distance between AP1 and AP3 is DR1=C*(T1-T2), then draw a hyperbola
DT2=T1-T3; the distance between AP1 and AP2 is DR1=C*(T1-T3), then draw a hyperbola
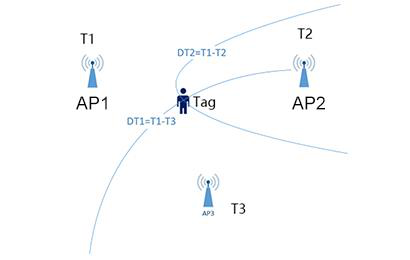
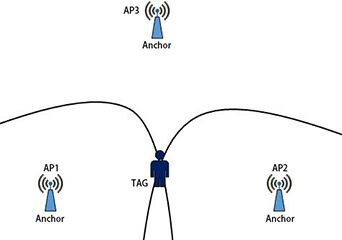
When the tag completes communication with the three anchor points, there will be three corresponding different arrival times (T1~T3). Then we calculate the time difference and the distance difference from the signal source to each anchor point. Since the distance difference between the tag and AP1 and AP2 is a constant, we can draw a hyperbola. In any two sets of anchors, the intersection of the two hyperbola points is the location of the tag.
The key point of this method is to keep all anchor points synchronized. There are two ways of time synchronization: wired and wireless. The former has higher synchronization accuracy, but the network maintenance is complicated due to the wired connection. The other is wireless synchronization, which has slightly lower accuracy than wired time synchronization, but the system is simple and can transmit data via WiFi, which will greatly reduce the total cost.
When time synchronization is completed, the tag sends a broadcast message, and all anchors send the timestamp of receiving the message to the server, and the server calculates the location of the tag.
Compare
Factors to consider when choosing a positioning method
1. System capacity
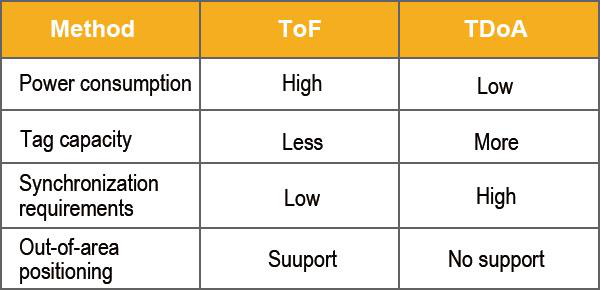
The ToF method is based on two-way ranging between the tag and each anchor point. The UWB tag needs to send and receive anchor point signals multiple times during each two-way ranging period. In the TDOA method, the tag only needs to send one broadcast message and complete the positioning. Therefore, the TDOA system has a higher capacity and can locate 1,500 tags.
2. Power consumption
Since anchor points are generally powered by AC power, while tags are powered by batteries, TOF requires UWB tags to complete ranging with each anchor point, and signals must be sent and received multiple times during each ranging period, which reduces battery life. For TDoA positioning, tags only need to send one broadcast message, which can be completed within 0.5ms from preparation to sending, and has a longer battery life.
3. Environmental requirements
TDoA is based on the time difference of arrival and generally uses a hyperbolic algorithm to calculate the position. The positioning accuracy is high in the area surrounded by the anchor point, but the positioning accuracy is poor outside the area. Therefore, when the tag is located in the periphery, we must use TOF anchors. In addition, in complex environmental scenarios such as power plants, due to the difficulty of system construction, TDoA positioning is difficult to meet project requirements. In this mode, ToF positioning can be better.
Questions and Answers
1. Where can TWR be used?
TWR can be used in places with complex environments, such as manufacturing plants, power plants, chemical plants, office buildings, etc.
2. Where can TDoA be applied?
TDoA can be applied to relatively open environments, such as outdoor sports, warehouses, etc.
3. How to choose TWR or TDoA?
Depends on: Tag endurance, positioning accuracy, single-area Tag capacity, installation environment, whether the Tag supports reverse data control (such as vibration), etc.
notes:
The UWB positioning system supports both TDoA and ToF positioning methods. The same UWB system allows you to experience two different positioning methods.
>>>>Click here to read the original article
|  提升卡
提升卡 变色卡
变色卡 千斤顶
千斤顶




